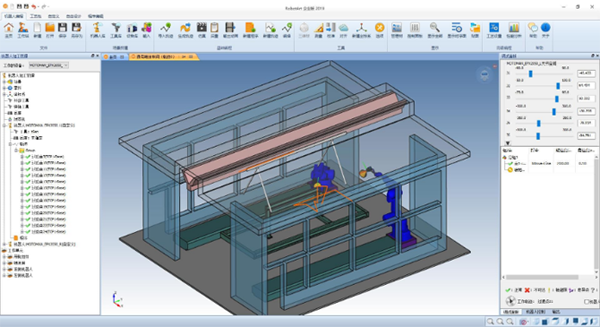
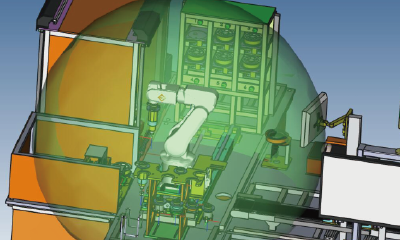
国产机器人离线编程仿真软件
PQArt原RobotArt
什么是PQArt (原RobotArt)?
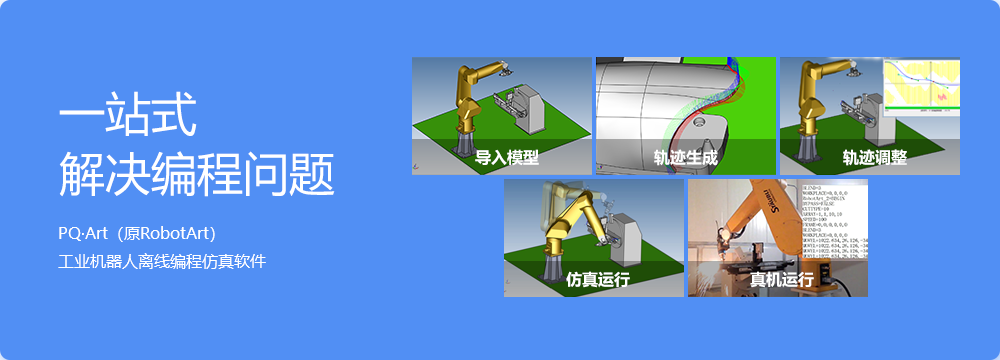
如果您正在做下面一件或几件事,那么您可能需要PQArt(原RobotArt)
给老板或用户呈报机器人工作站设计机器人编程,
尤其是采用示教编程方式比较复杂、困难
机器人选型更换零件批号生产,但不愿长时间停工
正在调研离线编程软件,但询价后惊讶于高昂的软件售价
核心功能
自主研发核心技术,解决复杂的编程问题
 立即下载
立即下载为什么选择PQArt(原RobotArt)?
 历经多年的技术积累与沉淀,凝练5大特点,6大核心技术国内外10万多用户的选择面向细分行业成熟的解决方案完善的线上、线下服务网络,覆盖国内主要机器人高密度区实时更新的在线使用手册、系统的在线视频课程,软件内嵌的问答服务,使得学习零障碍
历经多年的技术积累与沉淀,凝练5大特点,6大核心技术国内外10万多用户的选择面向细分行业成熟的解决方案完善的线上、线下服务网络,覆盖国内主要机器人高密度区实时更新的在线使用手册、系统的在线视频课程,软件内嵌的问答服务,使得学习零障碍
核心功能
自主研发核心技术,解决复杂的编程问题
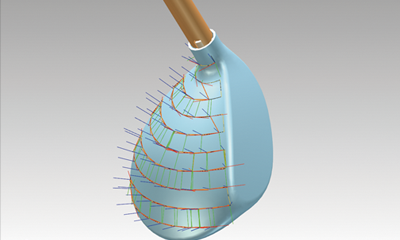
轨迹的生成与编辑
九大类生成轨迹方式,上百个轨迹参数,数十个参数化轨迹修改方式,总有一款适,数十个参数化轨迹修改方式,总有一款适,数十个参数化轨迹修改方式,总有一款适合您。
可达空间
软件不仅可以计算机器人的法兰位置的可达空间,也可以计算机器人末端执行器的可达空间,让您的工作站设
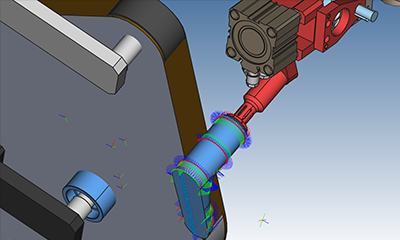
外部工具
机器人工作方式常见的有以下两种:①手持工具,零件固定。②手持零件,工具固定